Because of their complex terrain, studying submarine canyons and their underlying processes is a major challenge. Whittard Canyon, for example, has several sections with near-vertical or overhanging walls, which cannot be studied using traditional ‘over-the-side’ scientific equipment. Hence, we plan to use two of NOC’s underwater robotic vehicles from the MARS facilities (Marine Autonomous and Robotic Systems): the Remotely Operated Vehicle (ROV) ISIS and the Autonomous Underwater Vehicle (AUV) Autosub6000.
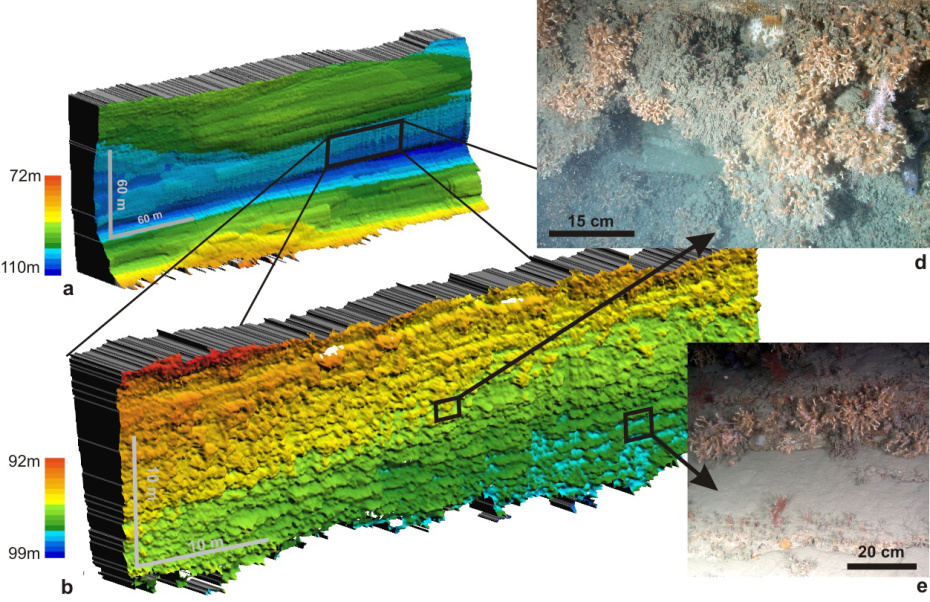
They will allow us to collect samples, video and photograph the seabed, and make acoustic maps anywhere in the canyon, such that we can obtain a correct picture of the environment, mapped and quantified in true 3D. Especially (near-)vertical walls are one of our targets. After an initial test in Whittard Canyon in 2009, using the ROV ISIS, we are now developing a new methodology within CODEMAP to carry out further sideways acoustic mapping of the canyon walls, using Autosub6000, while we will use the ROV to create extensive photomosaics.
In addition, we will take a third underwater vehicle on board: a glider provided by the University of East Anglia. This autonomous vehicle will be used to measure physical properties of the water column (e.g. temperature, salinity, turbidity), as it carries out a 25-day programme of vertical profiles strategically planned at several locations within Whittard Canyon. The results will let us get a handle on the water column structure and variability throughout the canyon, and on internal currents caused by internal waves and tides. It has been shown that these have an important impact on the benthic fauna, bringing food particles and keeping species free from being sedimented over. In order to create better habitat models for the canyon, this kind of information will be invaluable.